concave:
- far away is upside down, real image
- close, where , image is right side up and
convex:
- virtual image, right side up
concave case
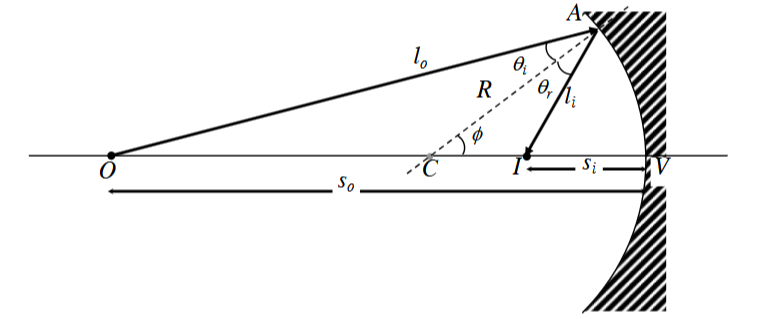 reflective case, so we use Law of reflection
similar to spherical refractive surface case, a spherical mirror can be considered as an OIS with the small angle approximation
reflective case, so we use Law of reflection
similar to spherical refractive surface case, a spherical mirror can be considered as an OIS with the small angle approximation
same as Gaussian formula
where .
sign convention:
- real, left of pos
- to right of , then pos
- real, left of
- for concave surface
- for convex surface
- real positive!
converging rays: real image even though image formed on the left rays can’t go to the right bc would be reflected but if rays are divergent, this causes virtual image
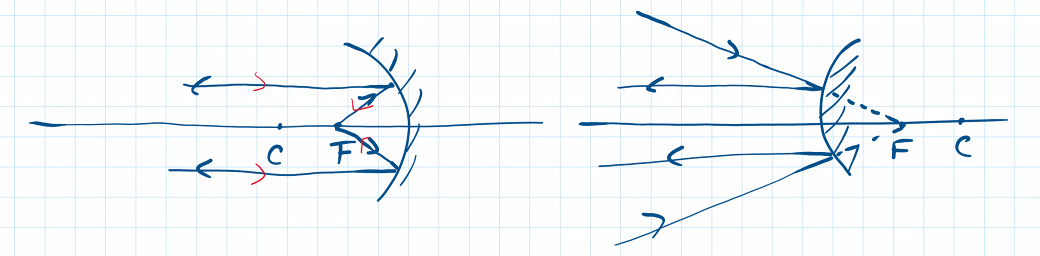
parallel rays coming in for focal length concave case
convex case
image at infty
mirrors vs lenses
- mirrors
- does not require transparent material
- can be large
- better structural support
- lenses
- requires transparent material
- difficult to be large
- limited options for structural support
- input/output occupy different spaces
example: Hubble Space Telescope
- why in space? because air is dense and scatters light. space is much more transparent. therefore less aberrations. higher light intensity
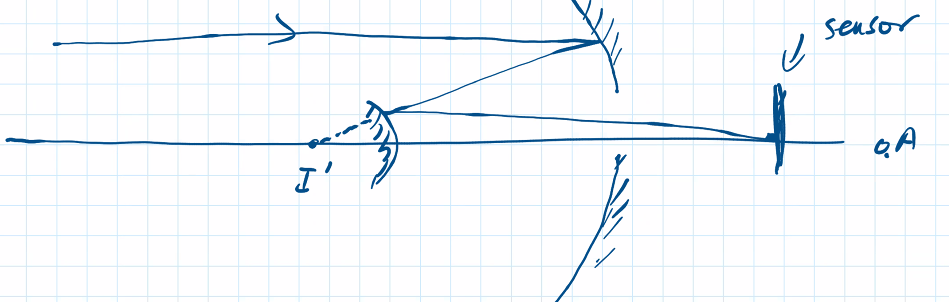
- rays hit primary mirror, reflected into a convex mirror, reflected through hole in primary mirror to an image sensor
- metres
- distance between mirrors is about 4.6 metres
Angular resolution for stars
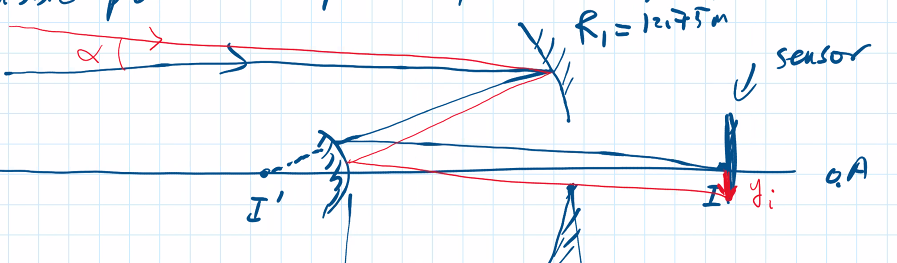 need to find relationship between and
need to find relationship between and
- find imaging point of first mirror, which is basically the focus. if rays are roughly parallel
metres
since metres, then real image is serving as a virtual object for the 2nd mirror, bc light rays converge to second mirror (light rays going from RTL)
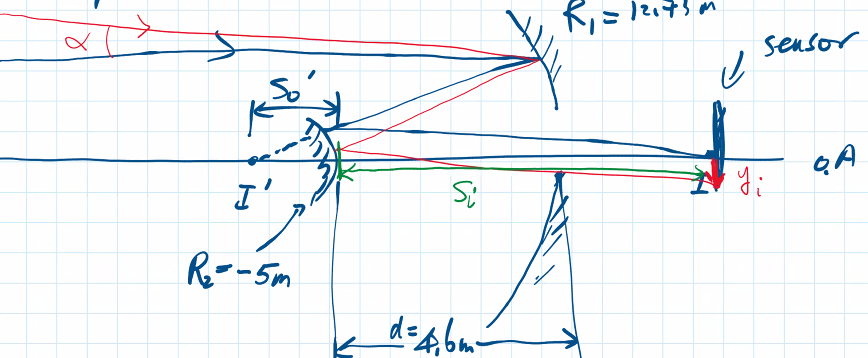 where radius of 2nd mirror is -5 m (negative bc convex)
where radius of 2nd mirror is -5 m (negative bc convex)
find relation between
= m/rad