Small signal modelling is an analysis technique used to approximate non-linear behaviour with a linear equation. This is especially useful in analysing non-linear circuit elements, like diodes or transistors. More on that at a dedicated page.
Premise
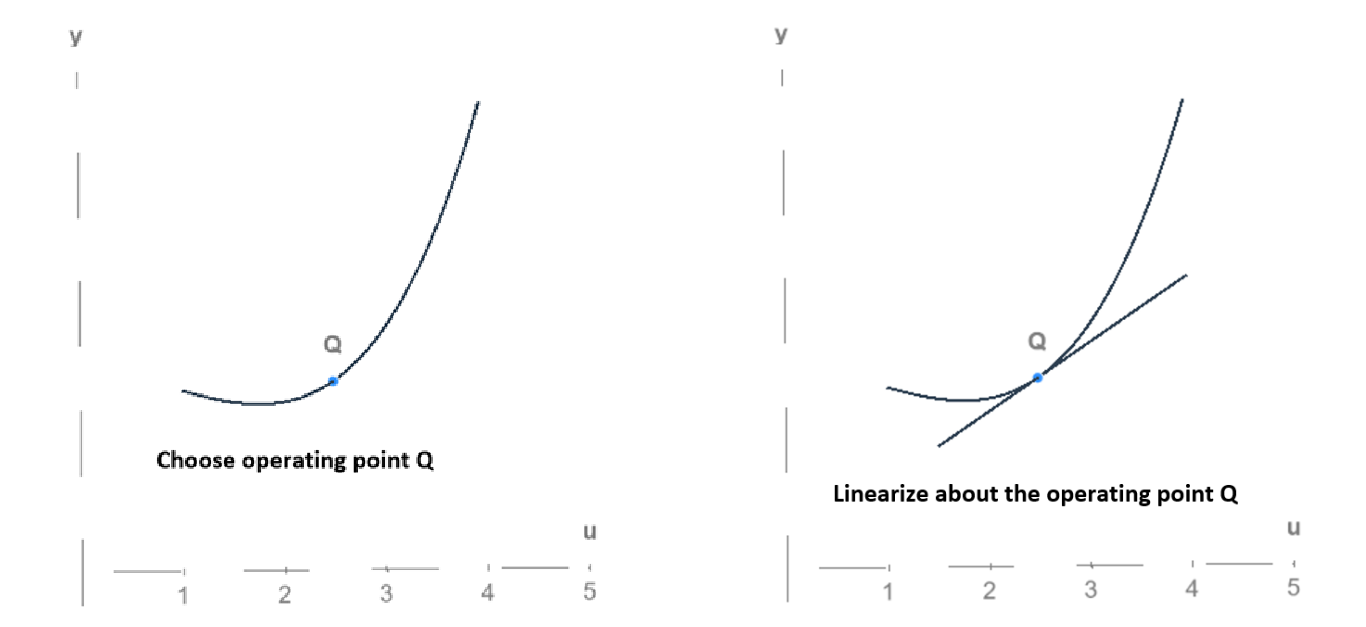
The general procedure for small signal modelling is:
- Take some function with some operating point (also called the bias point or quiescent point) along the curve.
- We then take a linear approximation about the point.
- Apply some small change in a time varying input to find a small signal output. The -component of the point is and the -component of the point is . Consider these constant values.
Visually:
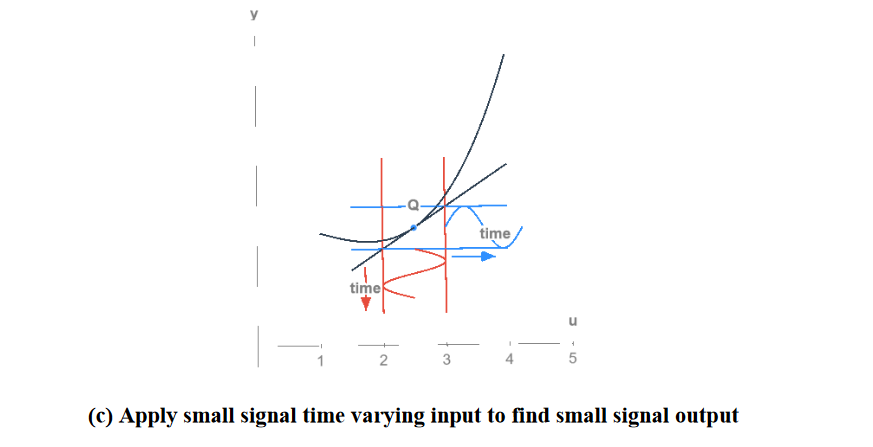 What does this mean though? Because we use a linear approximation, we’re interested in small variations about the operating point . Because we vary by a small amount of time about , we define some new value of the input variable with respect to a small change in ():
What does this mean though? Because we use a linear approximation, we’re interested in small variations about the operating point . Because we vary by a small amount of time about , we define some new value of the input variable with respect to a small change in ():
The result of this is that our output signal will also vary by a small amount about . In the relation below, is some constant (probably related to the operating point) and is time.
Our goal: to find the relationship between and for some function , i.e., how does vary as a function of time for some small change in the input ?
Note from the above graph that we overlay another time-varying curve (i.e., we add a new curve wrt time that wasn’t there before).
Definitions
There’s a lot of notation and terminology thrown around:
- Operating point () — The point we linearise about; in circuits, this is a DC offset value. has two parameters in space: .
- Assume , where is a constant value. Then, is said to be an equilibrium point if . This is useful in control systems analysis.
- In other words, we set .
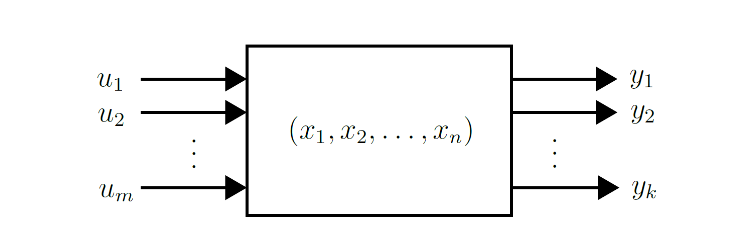
- State variable () — variable in a first-order derivative . As a result of the input variables varying, the state variables vary slightly about a state variable equilibrium point .
- Input variable () — variable representing an excitation signal, like an input voltage or current source. They are small input signal variations that vary about an equilibrium point .
- Output variable () — function of the state variable and input variable, . As a result of input variables varying, the output variables vary about an equilibrium point .
- State-space model — links state variables, excitation inputs, and output variables together, with first-order non-linear differential equations.
Procedure
We have a multi-step procedure:
- Step 1 — Convert space variable equations into state space equations (take the derivative). Expand the state space equations and output equations in terms of , , and using the first-order Taylor series. The result are linear differential equations and linear output equations. Oftentimes we are given these equations and can safely skip this step.
- Step 2 — Determine equilibrium solutions:
- Determine the equilibrium for the state space equations . Set the derivatives to 0 and solve for whatever and are.
- Determine the equilibrium for the output variables . Into the output equation, input the equilibrium values we found for above and the equilibrium input variables that we were given to find
- Step 3 — For the perturbations in the state space equations, we can take the equations, and evaluate the respective Jacobians at the equilibrium points (compute Jacobian then evaluate).
- In control theory terms, is . is . is . is .
- Step 4 — substitute it back into the state representation.
Side notes
For the single variable case, our general procedure takes 4 steps:
- Step 1 — write as a function of the operating point and some small variance.
- Step 2 — Expand the right hand side of the expression up to the first-order Taylor series. Evaluate the expression at the operating point .
- Step 3 — Equate the left-hand side with the expansion we just did.
- Step 4 — Determine the small signal model by expressing in terms of on one side. In this case, .