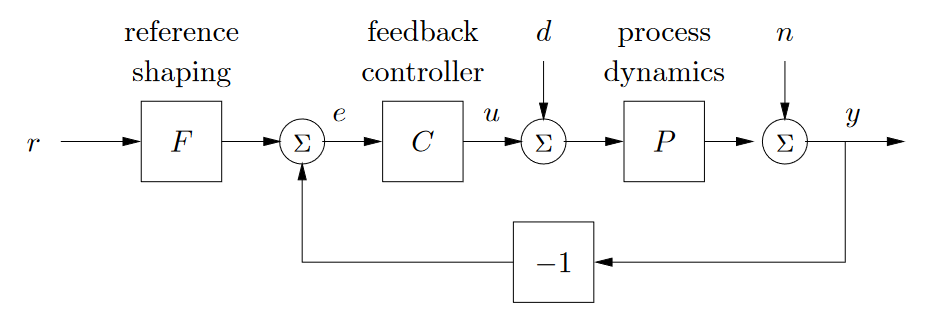
Two of our main goals when designing system controllers relate to asymptotic tracking of the error signal. Recall, where the error signal is :
- For all reference signals , when , the asymptotic tracking error should be bounded or converge to zero.
- For all disturbance signals and for all reference signals , the asymptotic tracking error is bounded or is zero.
Recall that is the transfer function for the system, and that is the controller’s transfer function. The transfer function between and is , called the sensitivity function. When has poles at , then is of type .
To generalise past polynomial reference signals, we rely on the internal model principle. In general, if any zeroes of are poles of , then the tracking problem has no solution.
Polynomial reference signals
For any in the class of polynomial reference signals with order , then the following holds (by theorem):
- If has poles at , then:
- If has poles at , then:
- If has less than poles at , then:
If has no poles at or less than poles, we need to add poles to . However, we have to keep in mind two key principles. The first is that must be BIBO stable with no unstable zero-pole cancellations (i.e., poles in RHP). The second is that .
We add poles as necessary. For example, a PI controller adds a pole at 0 and things work out fine. Note that some tracking problems are unsolvable. In general, if has any zeroes at , then it’s impossible to achieve asymptotic tracking for polynomial reference signals.
Steady-state error
As usual, we’re interested in the steady-state error. By the final-value theorem:
The final-value theorem only holds if is asymptotically stable and has no more than 1 pole at .
 Then, we can find as follows:
Then, we can find as follows: